
Un enfoque progresivo, comenzando en cocheras y entornos controlados, permite reducir riesgos y generar retorno desde las primeras fases
La conducción autónoma ya no se plantea como un salto al vacío, sino como un proceso gradual y medido. En el transporte público, donde la fiabilidad del servicio es esencial, la implantación de nuevas tecnologías debe integrarse en la operativa diaria sin alterar el funcionamiento habitual. Por eso, la estrategia más realista pasa por evolucionar paso a paso, empezar en entornos controlados y escalar únicamente aquello que demuestra resultados.
Así lo expone el documento “Revolution Evolution: The Practical Path to Autonomous Buses”, que defiende que la autonomía debe introducirse en dominios bien definidos, aprender en condiciones reales y ampliar capacidades de forma progresiva .


 Empezar en cocheras: un entorno seguro, controlado y medible
Empezar en cocheras: un entorno seguro, controlado y medible
La autonomía se vuelve verdaderamente operativa cuando comienza en espacios previsibles, acotados y seguros. En este sentido, las cocheras se presentan como el escenario ideal: movimientos a baja velocidad, sin pasajeros y con dinámicas repetitivas que facilitan tanto la supervisión como el aprendizaje .
En estos espacios se realizan cada día maniobras que no generan ingresos, pero sí consumen recursos: estacionamientos, reposicionamientos, desplazamientos a zonas de carga, lavado o mantenimiento, además de operaciones de reorganización interna .
Automatizar estas tareas permite recuperar tiempo de conductor, optimizar los flujos internos y reducir cuellos de botella. Y lo más relevante es que los beneficios pueden medirse desde el inicio en términos claros: ahorro de horas y mejora de la eficiencia operativa .
El informe subraya que los operadores no adoptan simplemente una herramienta tecnológica, sino una capacidad operativa integral, lo que obliga a abordar la implantación desde varias dimensiones: técnica, organizativa, de procesos y de personas .
 Del piloto al modelo sostenible: generar ahorro desde el aprendizaje
Del piloto al modelo sostenible: generar ahorro desde el aprendizaje
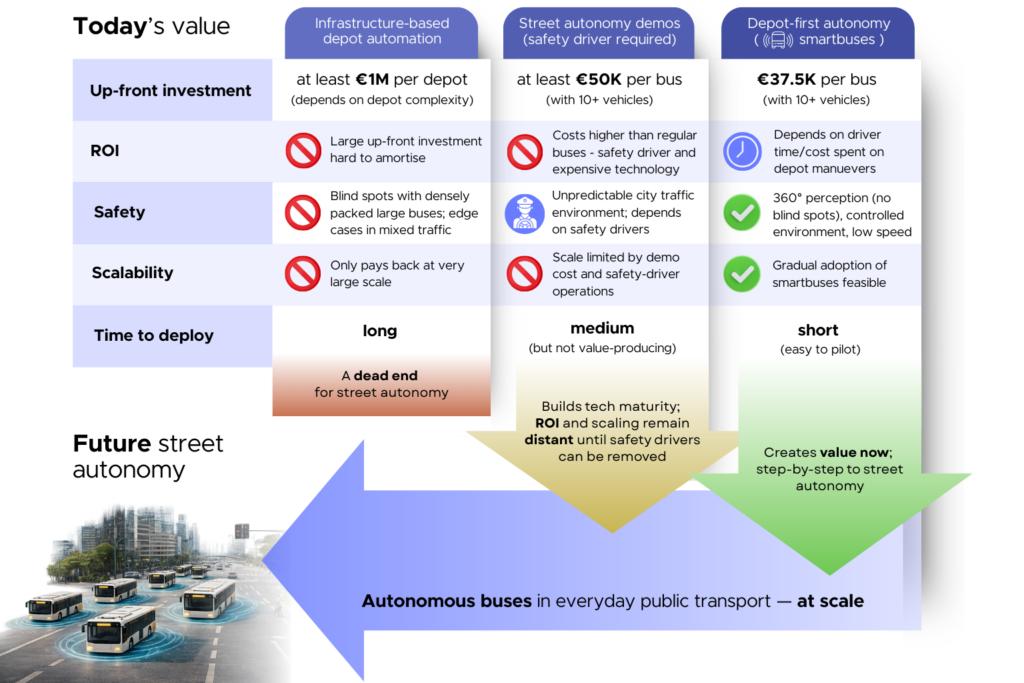
Uno de los principales riesgos en los programas de conducción autónoma es que queden limitados a proyectos piloto. Esto ocurre cuando la inversión inicial es elevada y los beneficios tardan en materializarse, o cuando la tecnología sigue requiriendo un conductor de seguridad a bordo, manteniendo así los costes operativos .
Frente a este escenario, el enfoque “depot-first” —autonomía primero en cocheras— parte de una premisa clara: la fase de aprendizaje debe producir ahorros tangibles desde el primer momento . En este modelo, los llamados “smartbuses”, equipados con tecnología para movimientos autónomos en el depósito, simplifican la adopción al evitar grandes inversiones específicas por emplazamiento, eliminar la dependencia de conductores de seguridad y vincular el retorno directamente al tiempo de maniobra y al coste laboral .
El despliegue se estructura en tres etapas progresivas: comenzar con un vehículo para validar el sistema; ampliar a una pequeña flota para integrarlo en la rutina diaria; y, finalmente, escalar a mayores volúmenes estandarizando procesos y mejorando la economía por unidad .
El destino final es la autonomía en calle. Sin embargo, el mensaje es claro: alcanzar ese objetivo sin comprometer la fiabilidad exige una evolución ordenada. En el transporte público, donde cada jornada cuenta y cualquier interrupción tiene impacto directo en miles de usuarios, la verdadera revolución consiste en avanzar con seguridad, paso a paso, hasta que la tecnología forme parte natural del servicio.



{kind=link}